Background
Project Duration: 2 Weeks
Software Used: Principle, Sketch
For this project I was tasked with exploring what is possible using microcontrollers in a short space of time. The first week of this project was dedicated to getting to grips with the arduino platform by building several mini projects which I have documented on a Tumblr blog. For the second week I was open to pursue a build of my own interest.
The Build
As I didn't want to rely on copying existing project from instructables, and I was conscious of my lack of understanding about electronics, I thought it would be interesting to take an existing 'dumb' electronic device and add a computer to it in order to expand its capabilities.
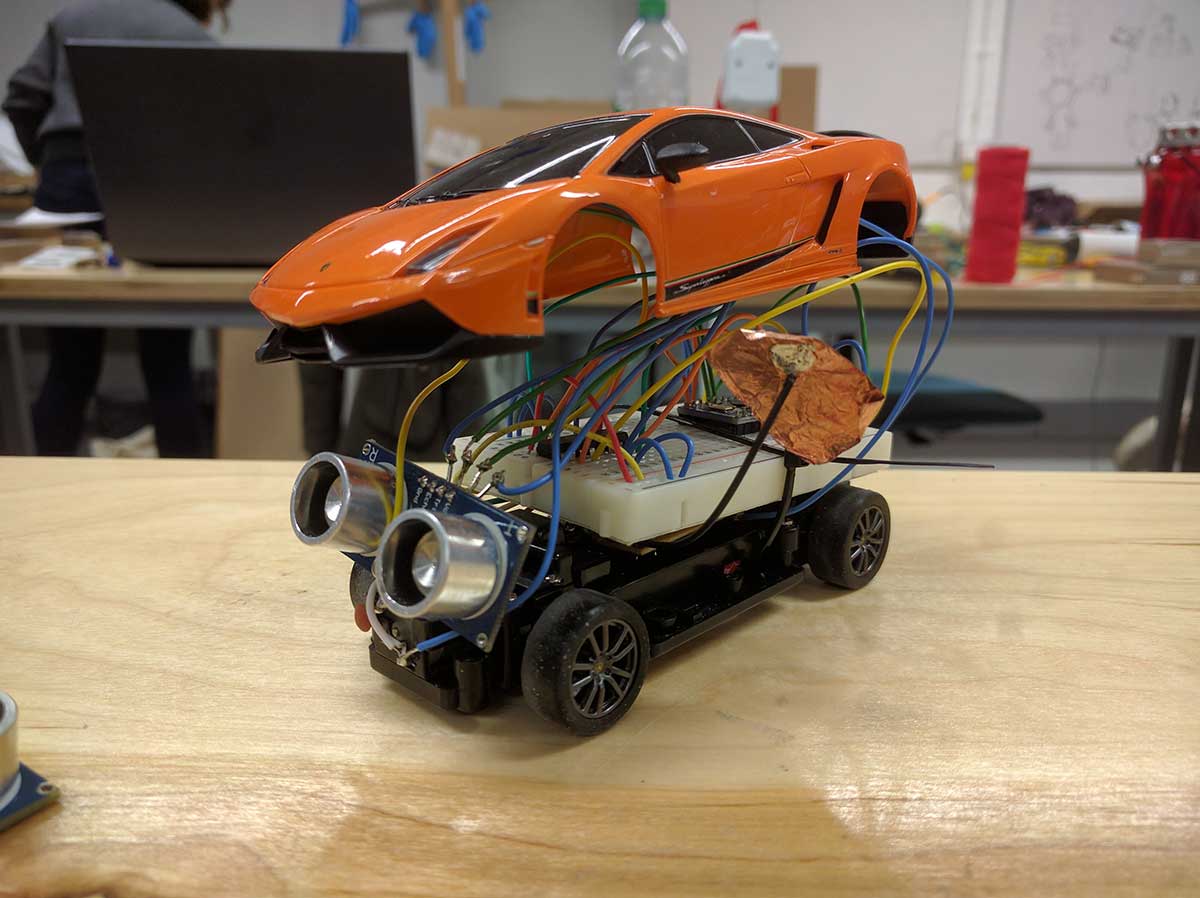
I did what any dedicated designer would I went out and bought a Lamborghini to tear apart.

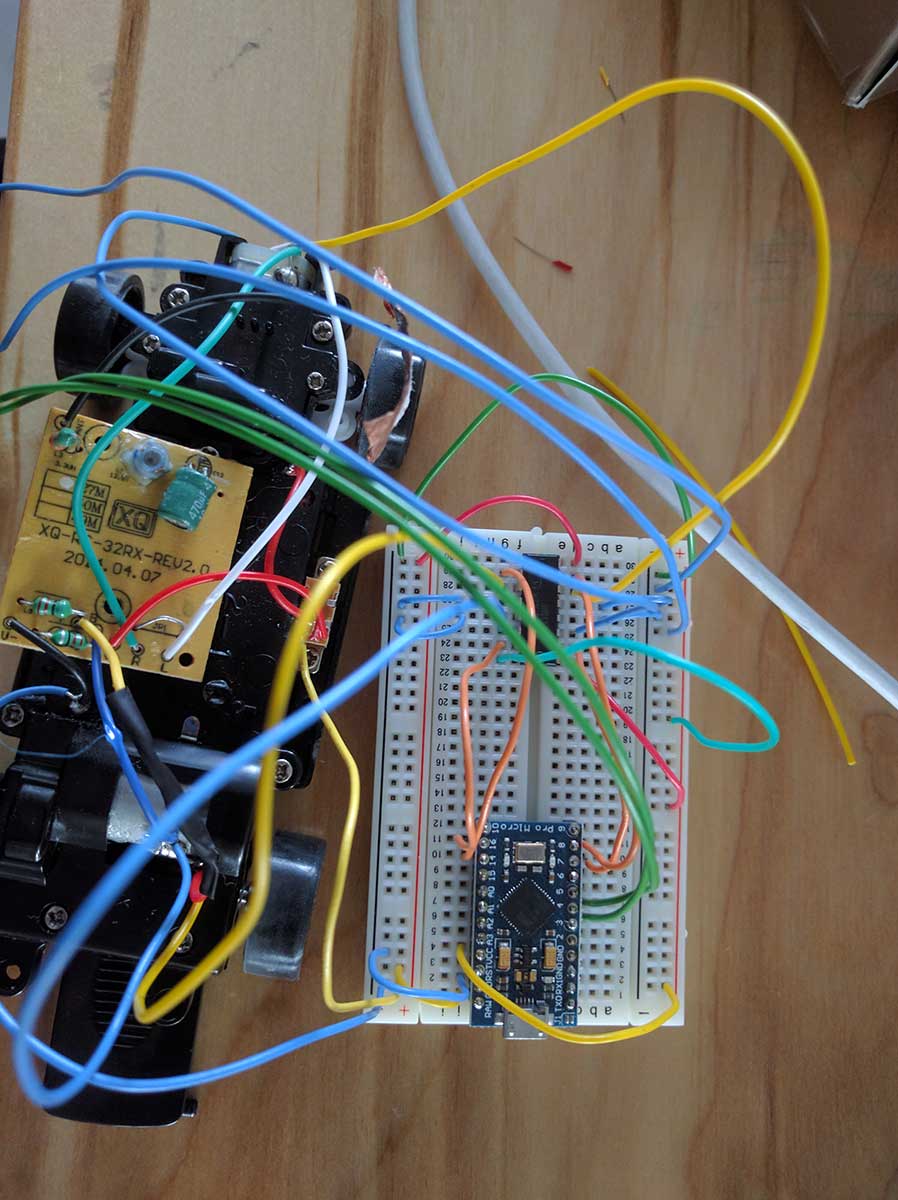
The RC car I bought uses two DC motors: one for the steering, and one for the throttle. The two are controlled by a L293D motor driver IC (commonly used for controlling two motors). I left the existing IC and added an Arduino nano with another twin motor IC wired in parallel. A distance sensor on the front on the RC car checks if there are obstacles, and when there are, the car reverses while turning, before continuing to drive forward until it meets another obstacle (in this case the momentum carries it forward so it really does meet the obstacles).
The radio transmitter works by closing a circuit to send either input for the steering or the throttle. I used another pair of ultrasonic sensors in addition to several NPN transistors as switches to change the input method to what I call 'hover hands'. When the transmitter is powered, the car is manually controlled using the two distance distance sensors. When the transmitter is turned off however, the car returns to autonomous crashing.